
RECORRIDOS DE UN ÁRBOL
En ciencias de la computación, el recorrido de árboles refiere al proceso de visitar de una manera sistemática, exactamente una vez, cada nodo en una estructura de datos de árbol (examinando y/o actualizando los datos en los nodos). Tales recorridos están clasificados por el orden en el cual son visitados los nodos. Los siguientes algoritmos son descritos para un árbol binario, pero también pueden ser generalizados a otros árboles.
Comparado a las estructuras de datos lineales como las listas enlazadas y arreglos unidimensionales, que tienen un método canónico de recorrido, las estructuras arborescentes pueden ser recorridas de muchas maneras diferentes. Comenzando en la raíz de un árbol binario, hay tres pasos principales que pueden ser realizados y el orden en la cual son realizados define el tipo de recorrido. Estos pasos (en ningún orden particular) son: ejecución de una acción en el nodo actual (referido como “visitando” el nodo), recorriendo al nodo hijo de la izquierda, y recorriendo al nodo hijo de la derecha. Así el proceso más fácilmente descrito a través de la recursión.
Los nombres dados para un estilo particular de recorrido vienen de la posición del elemento de raíz con respecto a los nodos izquierdo y derecho. Imagine que los nodos izquierdo y derecho son constantes en espacio, entonces el nodo raíz pudiera colocarse a la izquierda del nodo izquierdo (pre-orden), entre el nodo izquierdo y derecho (in-orden), o a la derecha del nodo derecho (post-orden).
Con el fin de ilustrar, se asume que los nodos izquierdos tienen siempre prioridad sobre los nodos derechos. Este ordenamiento puede ser invertido mientras el mismo orden sea asumido para todos los métodos de recorrido.


%5B1%5D.png)
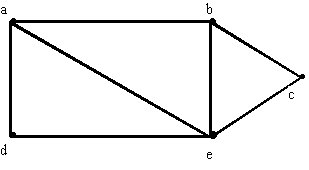












 es un ciclo euleriano, luego es un grafo euleriano.
es un ciclo euleriano, luego es un grafo euleriano.


 es una ecuación que relaciona
es una ecuación que relaciona  con alguno de sus predecesores
con alguno de sus predecesores  . Las condiciones iniciales para la sucesión
. Las condiciones iniciales para la sucesión  son valores dados en forma explícita para un número finito de términos de la sucesión.
son valores dados en forma explícita para un número finito de términos de la sucesión.








